




Индивидуальная автоматическая загрузочная платформа для бочек со смазочным маслом
Атрибуты продукта
| Форма упаковочного материала: полиэтиленовое квадратное ведро |
| Торговая марка: Интеллектуальное оборудование восхода солнца |
| Индивидуальный: Да |
| Транспортный пакет: деревянный ящик |
| Применение: бочки для смазочного масла |
Этикетка продукта
Индивидуальная система, бочки для смазочного масла, система сортировки и подачи, автоматическая платформа, разливочная машина, упаковочная машина, упаковочная машина, линия по производству смазочного масла, индивидуальная машина, машина для разборки, смазочное масло.
информация о продукте
Введение оборудования
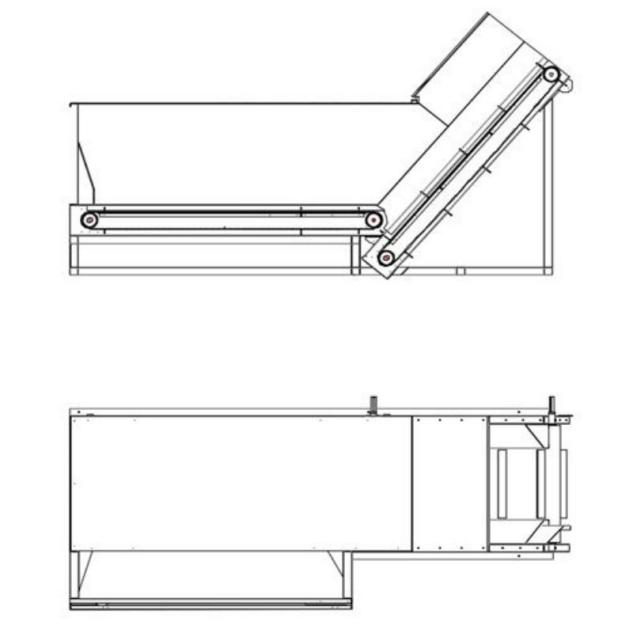
1. Устройство ремня подъема ковша:
Двухступенчатый ленточный конвейер поднимает бочки с маслом на определенную высоту и направляет их на дифференциальный транспортер для обработки бутылок.Высота перегородки ремня составляет менее половины толщины нефтяных бочек, что способствует подъему однослойных нефтяных бочек и естественному качению стопки нефтяных бочек.

2. Дифференциальная обработка бутылок:
Дифференциальная скорость многосекционной транспортировки применяется для отделки и транспортировки бочки со смазочным маслом.Транспортировочная ширина входного отверстия бочкопроводящей части позволяет проходить одновременно двум бочкам, что снижает риск взаимного выдавливания бочки и повышает стабильность работы оборудования.Многоступенчатый конвейер с пошаговым управлением рычажным механизмом для регулировки расстояния между стволами.

3. Система визуального позиционирования:
Устанавливается во входной части грейферного конвейера.Система визуального позиционирования будет делать фотографии, чтобы определить местонахождение и определить состояние формы доставленных бочек с нефтью, сформировать данные и отправить их в роботизированную систему после анализа.Количество, положение и ориентация бочек с маслом, пройденных инспекционной стороной, будут отправлены на контроллер, и контроллер отправит соответствующие команды захвата двум ручным роботам-паукам в соответствии с полученными сигналами.
4. Ручной робот-паук для обработки бутылок:
Согласно информации о бочках с маслом, отправленной системой визуального обнаружения, положение захвата будет автоматически отрегулировано, чтобы захватить бочки с маслом, и бочки с маслом будут перевернуты под действием пятой оси, а бочки с маслом будут в вертикальном положении. и рука, закрепленная в сторону конвейера.Два робота-паука будут автоматически назначать задачи по захвату в зависимости от количества и скорости доставленных бочек с маслом.
5. Устройство восстановления:
Его основная функция заключается в сборе бочек с нефтью недействующими захватами и предотвращении скопления и повреждения бочек с нефтью недействующими захватами при особых обстоятельствах.
6. Устройство транспортировки бочек обеспечивает хорошее соединение и переход между конвейерной лентой каждой секции и конвейерной лентой разливочной машины, без ударов по бочке, сдавливания бочки и реверсирования бочки.

